9 - Stop Simulation¶
System in Analysis¶
The complete example code is available
here.
The mechanical powertrain to be studied is the one described in the
5 - DC Motor PWM Control
example.
In that example, the motor is controlled in order to keep the electric
current absorption below a threshold and to make the gear 6 reach a
specific final position and stay there.
We want to keep the current absorption control at the motor start-up and
apply an increasing load torque to the powertrain.
As the load torque increases, the motor current absorption does too, and
we want to stop the simulation if this absorption overcome a specific
threshold.
Second Step Model Set Up¶
We can define the increasing load torque as following:
import numpy as np
def ext_torque(time, angular_position, angular_speed):
return Torque(
value=50 + np.exp(time.to('sec').value - 20),
unit='mNm'
)
gear_6.external_torque = ext_torque
In order to use the motor absorbed current as stopping condition for the simulation, we have to measure this current absorption, so we have to instantiate an amperometer:
from gearpy.sensors import Amperometer
amperometer = Amperometer(target=motor)
See Amperometer for
more details on instantiation parameters.
Then, we have to define the simulation stopping condition:
from gearpy.utils import StopCondition
stop_condition = StopCondition(
sensor=amperometer,
threshold=Current(4, 'A'),
operator=StopCondition.greater_than_or_equal_to
)
See
StopCondition
for more details on instantiation parameters.
In this specific case, the solver will stop the computation if the
measured absorbed current is greater than or equal to 4 A.
We also apply a PWM motor control at the powertrain start-up, in order
to limit the motor current absorption below 2 A:
from gearpy.sensors import AbsoluteRotaryEncoder, Tachometer
from gearpy.motor_control.rules import StartLimitCurrent
from gearpy.motor_control import PWMControl
encoder = AbsoluteRotaryEncoder(target=gear_6)
tachometer = Tachometer(target=motor)
start = StartLimitCurrent(
encoder=encoder,
tachometer=tachometer,
motor=motor,
limit_electric_current=Current(2, 'A'),
target_angular_position=AngularPosition(10, 'rot')
)
motor_control = PWMControl(powertrain=powertrain)
motor_control.add_rule(rule=start)
Simulation Set Up¶
Finally, we can run the simulation by passing the defined motor control and the stopping condition to the solver:
solver.run(
time_discretization=TimeInterval(0.1, 'sec'),
simulation_time=TimeInterval(100, 'sec'),
motor_control=motor_control,
stop_condition=stop_condition
)
The time discretization is quite fine in order to grasp the rapidly
increasing load torque. Notice the simulation time is 100 seconds.
The remaining set-ups of the model stay the same.
Results Analysis¶
We can get the updated plot with the same code:
powertrain.plot(
figsize=(8, 8),
elements=['motor', 'gear 6'],
angular_position_unit='rot',
torque_unit='mNm',
variables=[
'angular position',
'angular speed',
'angular acceleration',
'driving torque',
'load torque',
'torque',
'electric current',
'pwm'
]
)
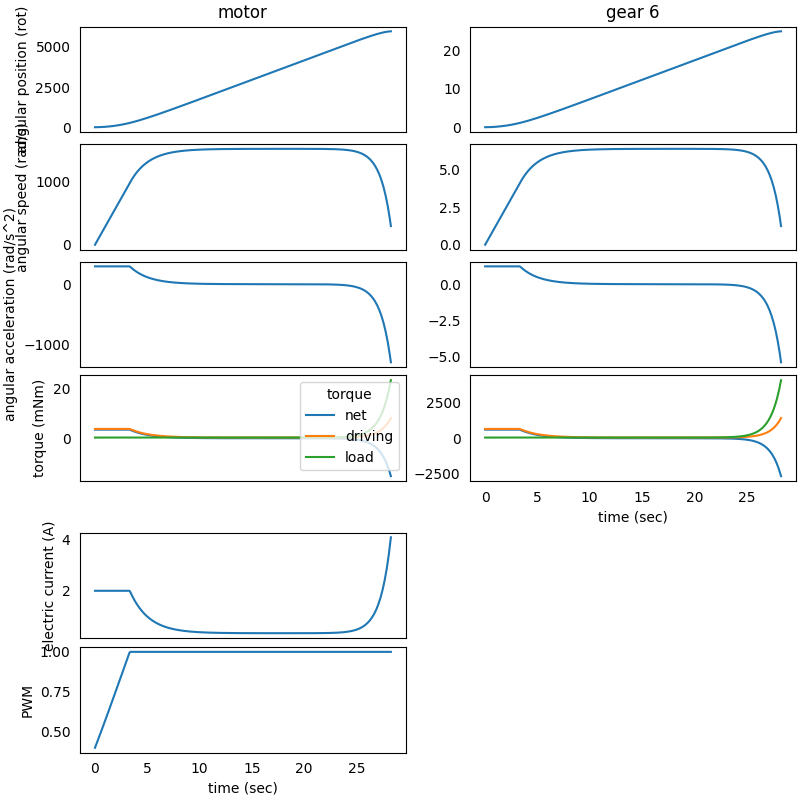
We can see that the motor PWM control is limiting the current absorption
below 2 A at the start-up, up until 4 seconds, then the powertrain
reaches a stationary working condition.
Around 25 seconds after the start-up, the load torque is increasing, and
it is no more negligible. In fact, also the motor absorbed current is
increasing up to 4 A, after which the simulation is stopped as desired,
even if the solver simulation time was set to 100 seconds.
The simulation stopping condition can be based on a current, an angular
position or an angular speed; so it is required to respectively pass an
amperometer, an encoder or a tachometer to the
StopCondition
object.